| dc.contributor.advisor | Sverre Hendseth | |
| dc.contributor.advisor | Martinius Knudsen | |
| dc.contributor.author | Areg Babayan | |
| dc.date.accessioned | 2019-10-31T15:01:05Z | |
| dc.date.issued | 2019 | |
| dc.identifier | no.ntnu:inspera:35771502:18199091 | |
| dc.identifier.uri | http://hdl.handle.net/11250/2625657 | |
| dc.description.abstract | NTNU Cyborg-prosjektet har som målsetning å muliggjøre kommunikasjon
mellom levende nerveceller og en robot, og dermed utvikle en cyborg. Denne
oppgaven presenterer arbeid utført på en av prosjektets roboter, The Cyborg,
som på sikt skal transformeres til en cyborg og maskot for universitetet.
Fokuset er på å gjøre the Cyborgen klar for demonstrasjon. Kroppen og LED
domen til Cyborgen må ferdigstilles og integreres, og resterende Cyborg ROS
moduler integreres.
Motivasjon for en enklere programvarestruktur og en evaluering av Cy-
borgen presenteres. De nåværende Cyborg ROS modulene blir delvis reim-
plementert, med formål om å redusere kompleksiteten. En adferdsmodul
blir designed og implementert, modulen gjør flitting brukte utgangsmoduler
tilgjengelig via et felles grensesnitt, og lar en forhåndsinstille adferder som
kan bli brukt av andre moduler eller som tilstander i tilstandsmaskinen.
Cyborg start boksen blir oppgradert for å gjøre det mulig å stoppe og starte
nye moduser, og navnet blir endret for å passe den nye funksjonaliteten bedre.
Som en videreføring av forfatterens spesialiseringsprosjekt, blir kontrolleren
til LED domen realisert, og tilhørende programvare ferdigstilt. Forfatteren
har assistert grupper fra Eksperter i Team med deres arbeid på kroppen,
LED domen og programvare relatert til Cyborgen, deres bidrag har vist seg
å være til stor nytte for prosjektet. Kroppen til Cyborgen er ferdigstilt, og
LED domen integrert i Cyborgen.
Det blir argumentert for hvorfor en omstrukturering av programvaren var
iiidet rette valget, og en liste over foreslåtte fremtidige oppgaver presenteres. På
slutten av denne oppgaven er tilfresstiller Cyborgen de angitte spesifikasjonene,
og den er klar for demonstrasjon. | |
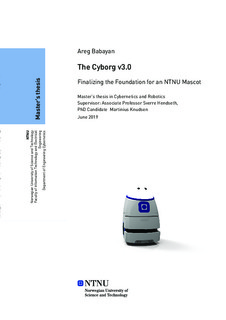
| dc.description.abstract | The NTNU Cyborg project aims to enable communication between living
nerve tissue and a robot, thereby creating a cyborg. This thesis presents work
done on one of the projects robots, The Cyborg, aimed at being transformed
into a cyborg and university mascot. The focus is on making the Cyborg
ready for demonstration. The Cyborg body and LED dome needs to be
finished and integrated, and all current Cyborg ROS modules integrated.
Motivation for a simpler software structure and an evaluation of the Cyborg
is presented. The current Cyborg ROS modules are partly reimplemented,
with the aim of reducing complexity. A behavior module is also designed and
implemented. The module makes commonly used output modules available
through a single interface, while providing a way to configure simple behavioral
presets that can be used by other modules or as states for the Cyborg state
machine. The Cyborg Start-up Box is upgraded, adding the ability to
terminate and select new modes of operation on the Cyborg, the name is
changed to Mode Selector in order to better fit the new function.
As a continuation of the authors specialization project, the controller for
the LED dome is realized and the corresponding software finished. The author
has assisted Experts in Team groups with their work on the Cyborg body,
LED dome, and software, their contribution has proven greatly beneficial for
the project. The Cyborg body is finished and the LED dome integrated into
the Cyborg.
An argument is made for why the restructured software was the right
ichoice, and a list of proposed future tasks is presented. At the end of
this thesis the Cyborg satisfies the presented specifications and is ready for
demonstration. | |
| dc.language | eng | |
| dc.publisher | NTNU | |
| dc.title | The Cyborg v3.0: Finalizing the Foundation for an NTNU Mascot | |
| dc.type | Master thesis | |