Ship Collision Avoidance and Anti Grounding Using Parallelized Cost Evaluation in Probabilistic Scenario-Based Model Predictive Control
| dc.contributor.author | Tengesdal, Trym | |
| dc.contributor.author | Johansen, Tor Arne | |
| dc.contributor.author | Grande, Tom Daniel | |
| dc.contributor.author | Blindheim, Simon André Johnsen | |
| dc.date.accessioned | 2022-12-27T13:59:51Z | |
| dc.date.available | 2022-12-27T13:59:51Z | |
| dc.date.created | 2022-10-26T21:34:10Z | |
| dc.date.issued | 2022 | |
| dc.identifier.citation | IEEE Access. 2022, 10 111650-111664. | en_US |
| dc.identifier.issn | 2169-3536 | |
| dc.identifier.uri | https://hdl.handle.net/11250/3039571 | |
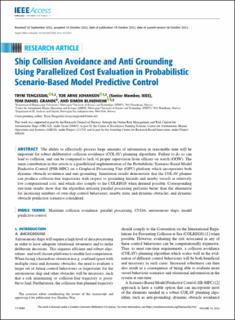
| dc.description.abstract | The ability to effectively process large amounts of information in reasonable time will be important for robust deliberative collision avoidance (COLAV) planning algorithms. Failure to do so can lead to collision, and can be compared to lack of proper supervision from officers on watch (OOW). The main contribution in this article is a parallelized implementation of the Probabilistic Scenario-Based Model Predictive Control (PSB-MPC) on a Graphical Processing Unit (GPU) platform which incorporates both dynamic obstacle avoidance and anti-grounding. Simulation results demonstrate that the COLAV planner can produce collision-free trajectories with respect to grounding hazards and nearby vessels at relatively low computational cost, and which also comply to the COLREGS when deemed possible. Corresponding run-time results show that the algorithm utilizing parallel processing performs better than the alternative for increasing numbers of own-ship control behaviours, nearby static and dynamic obstacles, and dynamic obstacle prediction scenarios considered. | en_US |
| dc.language.iso | eng | en_US |
| dc.publisher | IEEE | en_US |
| dc.rights | Navngivelse 4.0 Internasjonal | * |
| dc.rights.uri | http://creativecommons.org/licenses/by/4.0/deed.no | * |
| dc.title | Ship Collision Avoidance and Anti Grounding Using Parallelized Cost Evaluation in Probabilistic Scenario-Based Model Predictive Control | en_US |
| dc.title.alternative | Ship Collision Avoidance and Anti Grounding Using Parallelized Cost Evaluation in Probabilistic Scenario-Based Model Predictive Control | en_US |
| dc.type | Peer reviewed | en_US |
| dc.type | Journal article | en_US |
| dc.description.version | publishedVersion | en_US |
| dc.source.pagenumber | 111650-111664 | en_US |
| dc.source.volume | 10 | en_US |
| dc.source.journal | IEEE Access | en_US |
| dc.identifier.doi | 10.1109/ACCESS.2022.3215654 | |
| dc.identifier.cristin | 2065417 | |
| dc.relation.project | Norges forskningsråd: 309230 | en_US |
| dc.relation.project | Norges forskningsråd: 223254 | en_US |
| dc.relation.project | Norges forskningsråd: 280655 | en_US |
| cristin.ispublished | true | |
| cristin.fulltext | original | |
| cristin.qualitycode | 1 |
Tilhørende fil(er)
Denne innførselen finnes i følgende samling(er)

Med mindre annet er angitt, så er denne innførselen lisensiert som Navngivelse 4.0 Internasjonal