| dc.contributor.author | Zwilgmeyer, Peder Georg Olofsson | |
| dc.contributor.author | Yip, Mauhing | |
| dc.contributor.author | Teigen, Andreas Langeland | |
| dc.contributor.author | Mester, Rudolf | |
| dc.contributor.author | Stahl, Annette | |
| dc.date.accessioned | 2022-04-20T11:24:58Z | |
| dc.date.available | 2022-04-20T11:24:58Z | |
| dc.date.created | 2021-09-03T17:02:37Z | |
| dc.date.issued | 2021 | |
| dc.identifier.citation | IEEE International Conference on Computer Vision (ICCV). 2021, 3715-3723. | en_US |
| dc.identifier.issn | 1550-5499 | |
| dc.identifier.uri | https://hdl.handle.net/11250/2991611 | |
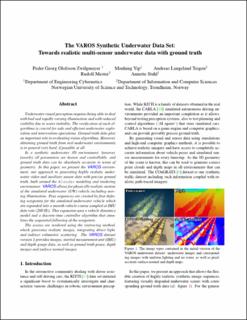
| dc.description.abstract | Underwater visual perception requires being able to deal with bad and rapidly varying illumination and with reduced visibility due to water turbidity. The verification of such algorithms is crucial for safe and efficient underwater exploration and intervention operations. Ground truth data play an important role in evaluating vision algorithms. However, obtaining ground truth from real underwater environments is in general very hard, if possible at all.In a synthetic underwater 3D environment, however, (nearly) all parameters are known and controllable, and ground truth data can be absolutely accurate in terms of geometry. In this paper, we present the VAROS environment, our approach to generating highly realistic under-water video and auxiliary sensor data with precise ground truth, built around the Blender modeling and rendering environment. VAROS allows for physically realistic motion of the simulated underwater (UW) vehicle including moving illumination. Pose sequences are created by first defining waypoints for the simulated underwater vehicle which are expanded into a smooth vehicle course sampled at IMU data rate (200 Hz). This expansion uses a vehicle dynamics model and a discrete-time controller algorithm that simulates the sequential following of the waypoints.The scenes are rendered using the raytracing method, which generates realistic images, integrating direct light, and indirect volumetric scattering. The VAROS dataset version 1 provides images, inertial measurement unit (IMU) and depth gauge data, as well as ground truth poses, depth images and surface normal images. | en_US |
| dc.language.iso | eng | en_US |
| dc.publisher | IEEE | en_US |
| dc.title | The VAROS Synthetic Underwater Data Set: Towards realistic multi-sensor underwater data with ground truth | en_US |
| dc.type | Peer reviewed | en_US |
| dc.type | Journal article | en_US |
| dc.description.version | acceptedVersion | en_US |
| dc.rights.holder | © IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works. | en_US |
| dc.source.pagenumber | 3715-3723 | en_US |
| dc.source.journal | IEEE International Conference on Computer Vision (ICCV) | en_US |
| dc.identifier.doi | 10.1109/ICCVW54120.2021.00415 | |
| dc.identifier.cristin | 1931283 | |
| dc.relation.project | Norges forskningsråd: 223254 | en_US |
| dc.relation.project | Norges forskningsråd: 304667 | en_US |
| cristin.ispublished | true | |
| cristin.fulltext | postprint | |
| cristin.qualitycode | 1 | |