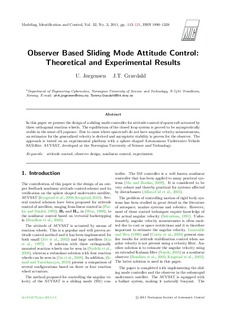
Observer Based Sliding Mode Attitude Control: Theoretical and Experimental Results
| dc.contributor.author | Jørgensen, Ulrik | |
| dc.contributor.author | Gravdahl, Jan Tommy | |
| dc.date.accessioned | 2019-10-11T08:51:35Z | |
| dc.date.available | 2019-10-11T08:51:35Z | |
| dc.date.created | 2012-01-02T13:23:07Z | |
| dc.date.issued | 2011 | |
| dc.identifier.citation | Modeling, Identification and Control. 2011, 32 (3), 113-121. | nb_NO |
| dc.identifier.issn | 0332-7353 | |
| dc.identifier.uri | http://hdl.handle.net/11250/2621519 | |
| dc.description.abstract | In this paper we present the design of a sliding mode controller for attitude control of spacecraft actuated by three orthogonal reaction wheels. The equilibrium of the closed loop system is proved to be asymptotically stable in the sense of Lyapunov. Due to cases where spacecraft do not have angular velocity measurements, an estimator for the generalized velocity is derived and asymptotic stability is proven for the observer. The approach is tested on an experimental platform with a sphere shaped Autonomous Underwater Vehicle SATellite: AUVSAT, developed at the Norwegian University of Science and Technology. | nb_NO |
| dc.language.iso | eng | nb_NO |
| dc.publisher | Norsk Forening for Automatisering | nb_NO |
| dc.rights | Navngivelse 4.0 Internasjonal | * |
| dc.rights.uri | http://creativecommons.org/licenses/by/4.0/deed.no | * |
| dc.title | Observer Based Sliding Mode Attitude Control: Theoretical and Experimental Results | nb_NO |
| dc.type | Journal article | nb_NO |
| dc.type | Peer reviewed | nb_NO |
| dc.description.version | publishedVersion | nb_NO |
| dc.source.pagenumber | 113-121 | nb_NO |
| dc.source.volume | 32 | nb_NO |
| dc.source.journal | Modeling, Identification and Control | nb_NO |
| dc.source.issue | 3 | nb_NO |
| dc.identifier.doi | 10.4173/mic.2011.3.3 | |
| dc.identifier.cristin | 874733 | |
| dc.description.localcode | All articles in MIC are published with the Creative Commons Attribution 3.0 Unported (CC BY 3.0) license | nb_NO |
| cristin.unitcode | 194,63,25,0 | |
| cristin.unitname | Institutt for teknisk kybernetikk | |
| cristin.ispublished | true | |
| cristin.fulltext | original | |
| cristin.qualitycode | 1 |
Files in this item
This item appears in the following Collection(s)

Except where otherwise noted, this item's license is described as Navngivelse 4.0 Internasjonal