| dc.contributor.author | Albert, Anders | |
| dc.contributor.author | Imsland, Lars Struen | |
| dc.date.accessioned | 2019-04-05T07:01:10Z | |
| dc.date.available | 2019-04-05T07:01:10Z | |
| dc.date.created | 2018-10-29T15:39:08Z | |
| dc.date.issued | 2018 | |
| dc.identifier.issn | 0921-0296 | |
| dc.identifier.uri | http://hdl.handle.net/11250/2593388 | |
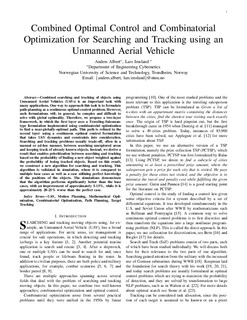
| dc.description.abstract | Combined searching and tracking of objects using Unmanned Aerial Vehicles (UAVs) is an important task with many applications. One way to approach this task is to formulate path-planning as a continuous optimal control problem. However, such formulations will, in general, be complex and difficult to solve with global optimality. Therefore, we propose a two-layer framework, in which the first layer uses a Traveling-Salesman-type formulation implemented using combinatorial optimization to find a near-globally-optimal path. This path is refined in the second layer using a continuous optimal control formulation that takes UAV dynamics and constraints into consideration. Searching and tracking problems usually trade-off, often in a manual or ad-hoc manner, between searching unexplored areas and keeping track of already known objects. Instead, we derive a result that enables prioritization between searching and tracking based on the probability of finding a new object weighted against the probability of losing tracked objects. Based on this result, we construct a new algorithm for searching and tracking. This algorithm is validated in simulation, where it is compared to multiple base cases as well as a case utilizing perfect knowledge of the positions of the objects. The simulations demonstrate that the algorithm performs significantly better than the base cases, with an improvement of approximately 5-15%, while it is approximately 20-25% worse than the perfect case. | nb_NO |
| dc.language.iso | eng | nb_NO |
| dc.publisher | Springer Verlag | nb_NO |
| dc.title | Combined Optimal Control and Combinatorial Optimization for Searching and Tracking Using an Unmanned Aerial Vehicle | nb_NO |
| dc.type | Journal article | nb_NO |
| dc.type | Peer reviewed | nb_NO |
| dc.description.version | acceptedVersion | nb_NO |
| dc.source.journal | Journal of Intelligent and Robotic Systems | nb_NO |
| dc.identifier.doi | 10.1007/s10846-018-0915-4 | |
| dc.identifier.cristin | 1624590 | |
| dc.relation.project | Norges forskningsråd: 223254 | nb_NO |
| dc.description.localcode | This is a post-peer-review, pre-copyedit version of an article published in [Journal of Intelligent and Robotic Systems] Locked until 8.8.2019 due to copyright restrictions. The final authenticated version is available online at: https://doi.org/10.1007/s10846-018-0915-4 | nb_NO |
| cristin.unitcode | 194,63,25,0 | |
| cristin.unitname | Institutt for teknisk kybernetikk | |
| cristin.ispublished | true | |
| cristin.fulltext | original | |
| cristin.fulltext | postprint | |
| cristin.qualitycode | 1 | |