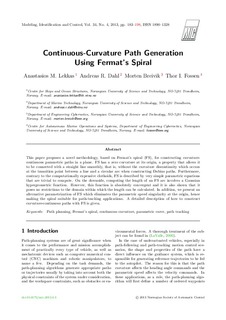
Continuous-Curvature Path Generation using Fermat's Spiral
| dc.contributor.author | Lekkas, Anastasios | |
| dc.contributor.author | Dahl, Andreas R | |
| dc.contributor.author | Breivik, Morten | |
| dc.contributor.author | Fossen, Thor I. | |
| dc.date.accessioned | 2017-11-07T08:34:58Z | |
| dc.date.available | 2017-11-07T08:34:58Z | |
| dc.date.created | 2013-12-14T09:47:22Z | |
| dc.date.issued | 2013 | |
| dc.identifier.citation | Modeling, Identification and Control. 2013, 34 (4), 183-198. | nb_NO |
| dc.identifier.issn | 0332-7353 | |
| dc.identifier.uri | http://hdl.handle.net/11250/2464436 | |
| dc.description.abstract | This paper proposes a novel methodology, based on Fermat's spiral (FS), for constructing curvature-continuous parametric paths in a plane. FS has a zero curvature at its origin, a property that allows it to be connected with a straight line smoothly, that is, without the curvature discontinuity which occurs at the transition point between a line and a circular arc when constructing Dubins paths. Furthermore, contrary to the computationally expensive clothoids, FS is described by very simple parametric equations that are trivial to compute. On the downside, computing the length of an FS arc involves a Gaussian hypergeometric function. However, this function is absolutely convergent and it is also shown that it poses no restrictions to the domain within which the length can be calculated. In addition, we present an alternative parametrization of FS which eliminates the parametric speed singularity at the origin, hence making the spiral suitable for path-tracking applications. A detailed description of how to construct curvature-continuous paths with FS is given. | nb_NO |
| dc.language.iso | eng | nb_NO |
| dc.publisher | Norsk Forening for Automatisering | nb_NO |
| dc.rights | Navngivelse 4.0 Internasjonal | * |
| dc.rights.uri | http://creativecommons.org/licenses/by/4.0/deed.no | * |
| dc.title | Continuous-Curvature Path Generation using Fermat's Spiral | nb_NO |
| dc.type | Journal article | nb_NO |
| dc.type | Peer reviewed | nb_NO |
| dc.description.version | publishedVersion | nb_NO |
| dc.source.pagenumber | 183-198 | nb_NO |
| dc.source.volume | 34 | nb_NO |
| dc.source.journal | Modeling, Identification and Control | nb_NO |
| dc.source.issue | 4 | nb_NO |
| dc.identifier.doi | 10.4173/mic.2013.4.3 | |
| dc.identifier.cristin | 1076757 | |
| dc.relation.project | Norges forskningsråd: 223254 | nb_NO |
| dc.description.localcode | © 2013 Norwegian Society of Automatic Control. All articles in MIC are published with the Creative Commons Attribution 3.0 Unported (CC BY 3.0) license. See: http://creativecommons.org/licenses/by/3.0/. | nb_NO |
| cristin.unitcode | 194,64,20,0 | |
| cristin.unitcode | 194,63,25,0 | |
| cristin.unitname | Institutt for marin teknikk | |
| cristin.unitname | Institutt for teknisk kybernetikk | |
| cristin.ispublished | true | |
| cristin.fulltext | original | |
| cristin.qualitycode | 1 |
Tilhørende fil(er)
Denne innførselen finnes i følgende samling(er)
-
Institutt for marin teknikk [3432]
-
Institutt for teknisk kybernetikk [3741]
-
Publikasjoner fra CRIStin - NTNU [38127]

Med mindre annet er angitt, så er denne innførselen lisensiert som Navngivelse 4.0 Internasjonal