A New Adaptive Cruise Control Strategy and Its Stabilization Effect on Traffic Flow
| dc.contributor.author | Lu, Chaoru | |
| dc.contributor.author | Aakre, Arvid | |
| dc.date.accessioned | 2018-12-11T15:25:44Z | |
| dc.date.available | 2018-12-11T15:25:44Z | |
| dc.date.created | 2018-10-18T15:03:37Z | |
| dc.date.issued | 2018 | |
| dc.identifier.issn | 1867-0717 | |
| dc.identifier.uri | http://hdl.handle.net/11250/2577233 | |
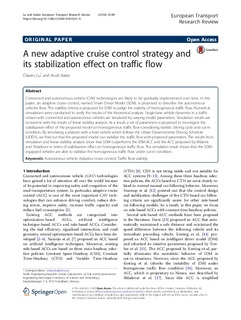
| dc.description.abstract | Connected and autonomous vehicle (CAV) technologies are likely to be gradually implemented over time. In this paper, an adaptive cruise control, named Smart Driver Model (SDM), is proposed to describe the autonomous vehicles flow. The stability criteria is proposed for SDM to judge the stability of homogeneous traffic flow. Numerical simulations were conducted to verify the results of the theoretical analysis. Single-lane vehicle dynamics in a traffic stream with connected and autonomous vehicles are simulated by varying model parameters. Simulation results are consistent with the results of linear stability analysis. As a result, a set of parameters is proposed to investigate the stabilization effect of the proposed model on homogeneous traffic flow considering realistic driving cycle and cut-in condition. By simulating a platoon with a lead vehicle which follows the Urban Dynamometer Driving Schedule (UDDS), we find out that the proposed model can stabilize the traffic flow with proposed parameters. The results from simulation and linear stability analysis show that SDM outperforms the IDM-ACC and the ACC proposed by Milanés and Shladover in terms of stabilization effect on homogeneous traffic flow. The simulation result shows that the SDM-equipped vehicles are able to stabilize the homogeneous traffic flow under cut-in condition. | nb_NO |
| dc.language.iso | eng | nb_NO |
| dc.publisher | SpringerOpen | nb_NO |
| dc.rights | Navngivelse 4.0 Internasjonal | * |
| dc.rights.uri | http://creativecommons.org/licenses/by/4.0/deed.no | * |
| dc.title | A New Adaptive Cruise Control Strategy and Its Stabilization Effect on Traffic Flow | nb_NO |
| dc.title.alternative | A New Adaptive Cruise Control Strategy and Its Stabilization Effect on Traffic Flow | nb_NO |
| dc.type | Journal article | nb_NO |
| dc.type | Peer reviewed | nb_NO |
| dc.description.version | publishedVersion | nb_NO |
| dc.source.volume | 10 | nb_NO |
| dc.source.journal | European Transport Research Review | nb_NO |
| dc.source.issue | 49 | nb_NO |
| dc.identifier.doi | 10.1186/s12544-018-0321-9 | |
| dc.identifier.cristin | 1621467 | |
| dc.description.localcode | © The Author(s). 2018 Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/) | nb_NO |
| cristin.unitcode | 194,64,91,0 | |
| cristin.unitname | Institutt for bygg- og miljøteknikk | |
| cristin.ispublished | true | |
| cristin.fulltext | original | |
| cristin.qualitycode | 1 |
Tilhørende fil(er)
Denne innførselen finnes i følgende samling(er)

Med mindre annet er angitt, så er denne innførselen lisensiert som Navngivelse 4.0 Internasjonal