UAV path planning using MILP with experiments
| dc.contributor.author | Albert, Anders | |
| dc.contributor.author | Leira, Frederik Stendahl | |
| dc.contributor.author | Imsland, Lars Struen | |
| dc.date.accessioned | 2018-06-29T05:53:35Z | |
| dc.date.available | 2018-06-29T05:53:35Z | |
| dc.date.created | 2017-11-15T13:32:50Z | |
| dc.date.issued | 2017 | |
| dc.identifier.citation | Modeling, Identification and Control. 2017, 38 (1), 21-32. | nb_NO |
| dc.identifier.issn | 0332-7353 | |
| dc.identifier.uri | http://hdl.handle.net/11250/2503677 | |
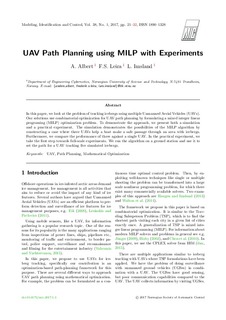
| dc.description.abstract | In this paper, we look at the problem of tracking icebergs using multiple Unmanned Aerial Vehicles (UAVs). Our solutions use combinatorial optimization for UAV path planning by formulating a mixed integer linear programing (MILP) optimization problem. To demonstrate the approach, we present both a simulation and a practical experiment. The simulation demonstrates the possibilities of the MILP algorithm by constructing a case where three UAVs help a boat make a safe passage through an area with icebergs. Furthermore, we compare the performance of three against a single UAV. In the practical experiment, we take the first step towards full-scale experiments. We run the algorithm on a ground station and use it to set the path for a UAV tracking five simulated icebergs. | nb_NO |
| dc.language.iso | eng | nb_NO |
| dc.publisher | Norsk Forening for Automatisering | nb_NO |
| dc.rights | Navngivelse 4.0 Internasjonal | * |
| dc.rights.uri | http://creativecommons.org/licenses/by/4.0/deed.no | * |
| dc.title | UAV path planning using MILP with experiments | nb_NO |
| dc.type | Journal article | nb_NO |
| dc.type | Peer reviewed | nb_NO |
| dc.description.version | publishedVersion | nb_NO |
| dc.source.pagenumber | 21-32 | nb_NO |
| dc.source.volume | 38 | nb_NO |
| dc.source.journal | Modeling, Identification and Control | nb_NO |
| dc.source.issue | 1 | nb_NO |
| dc.identifier.doi | 10.4173/mic.2017.1.3 | |
| dc.identifier.cristin | 1514413 | |
| dc.description.localcode | c 2017 Norwegian Society of Automatic Control. All articles in MIC are published with the Creative Commons Attribution 3.0 Unported (CC BY 3.0) license. See: http://creativecommons.org/licenses/by/3.0/. | nb_NO |
| cristin.unitcode | 194,63,25,0 | |
| cristin.unitname | Institutt for teknisk kybernetikk | |
| cristin.ispublished | true | |
| cristin.fulltext | original | |
| cristin.qualitycode | 1 |
Files in this item
This item appears in the following Collection(s)

Except where otherwise noted, this item's license is described as Navngivelse 4.0 Internasjonal