| dc.contributor.author | Sverdrup-Thygeson, Jørgen | |
| dc.contributor.author | Moe, Signe | |
| dc.contributor.author | Pettersen, Kristin Ytterstad | |
| dc.contributor.author | Gravdahl, Jan Tommy | |
| dc.date.accessioned | 2017-11-02T08:03:26Z | |
| dc.date.available | 2017-11-02T08:03:26Z | |
| dc.date.created | 2017-11-01T10:44:31Z | |
| dc.date.issued | 2017 | |
| dc.identifier.isbn | 978-1-5090-2181-9 | |
| dc.identifier.uri | http://hdl.handle.net/11250/2463587 | |
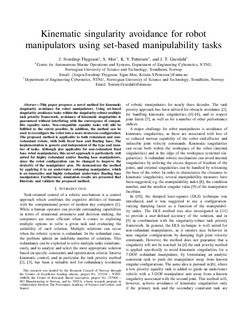
| dc.description.abstract | This paper proposes a novel method for kinematic singularity avoidance for robot manipulators. Using set-based singularity avoidance tasks within the singularity-robust multiple task priority framework, avoidance of kinematic singularities is guaranteed without interfering with the convergence of compatible equality tasks. Non-compatible equality tasks will still be fulfilled to the extent possible. In addition, the method can be used to reconfigure the robot into a more dexterous configuration. The proposed method is applicable to both redundant and nonredundant robots, with both fixed base and floating base. The implementation is generic and independent of the type and number of tasks. Although also applicable for non-redundant fixed base robot manipulators, this novel approach is particularly well suited for highly redundant and/or floating base manipulators, since the robot configuration can be changed to improve the dexterity of the manipulator arm. We demonstrate the method by applying it to an underwater swimming manipulator, which is an innovative and highly redundant underwater floating base manipulator. Furthermore, simulation results are presented that illustrate and validate the proposed method. | nb_NO |
| dc.language.iso | eng | nb_NO |
| dc.publisher | IEEE | nb_NO |
| dc.relation.ispartof | 1st IEEE Conference on Control Technology and Applications | |
| dc.title | Kinematic singularity avoidance for robot manipulators using set-based manipulability tasks | nb_NO |
| dc.type | Chapter | nb_NO |
| dc.description.version | acceptedVersion | nb_NO |
| dc.source.pagenumber | 142-149 | nb_NO |
| dc.identifier.cristin | 1509657 | |
| dc.relation.project | Norges forskningsråd: 223254 | nb_NO |
| dc.relation.project | VISTA: 6603 | nb_NO |
| dc.description.localcode | © 2017 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes,creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works. This is the authors' accepted and refereed manuscript to the article. | nb_NO |
| cristin.unitcode | 194,63,25,0 | |
| cristin.unitname | Institutt for teknisk kybernetikk | |
| cristin.ispublished | true | |
| cristin.fulltext | postprint | |
| cristin.qualitycode | 1 | |