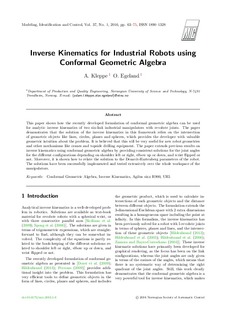
Inverse kinematics for industrial robots using conformal geometric algebra
| dc.contributor.author | Kleppe, Adam Leon | |
| dc.contributor.author | Egeland, Olav | |
| dc.date.accessioned | 2020-03-05T13:14:17Z | |
| dc.date.available | 2020-03-05T13:14:17Z | |
| dc.date.created | 2016-06-21T10:57:22Z | |
| dc.date.issued | 2016 | |
| dc.identifier.citation | Modeling, Identification and Control. 2016, 37 (1), 63-75. | nb_NO |
| dc.identifier.issn | 0332-7353 | |
| dc.identifier.uri | http://hdl.handle.net/11250/2645524 | |
| dc.description.abstract | This paper shows how the recently developed formulation of conformal geometric algebra can be used for analytic inverse kinematics of two six-link industrial manipulators with revolute joints. The paper demonstrates that the solution of the inverse kinematics in this framework relies on the intersection of geometric objects like lines, circles, planes and spheres, which provides the developer with valuable geometric intuition about the problem. It is believed that this will be very useful for new robot geometries and other mechanisms like cranes and topside drilling equipment. The paper extends previous results on inverse kinematics using conformal geometric algebra by providing consistent solutions for the joint angles for the different configurations depending on shoulder left or right, elbow up or down, and wrist flipped or not. Moreover, it is shown how to relate the solution to the Denavit-Hartenberg parameters of the robot. The solutions have been successfully implemented and tested extensively over the whole workspace of the manipulators. | nb_NO |
| dc.language.iso | eng | nb_NO |
| dc.publisher | Norsk Forening for Automatisering | nb_NO |
| dc.rights | Navngivelse 4.0 Internasjonal | * |
| dc.rights.uri | http://creativecommons.org/licenses/by/4.0/deed.no | * |
| dc.title | Inverse kinematics for industrial robots using conformal geometric algebra | nb_NO |
| dc.type | Journal article | nb_NO |
| dc.type | Peer reviewed | nb_NO |
| dc.description.version | publishedVersion | nb_NO |
| dc.source.pagenumber | 63-75 | nb_NO |
| dc.source.volume | 37 | nb_NO |
| dc.source.journal | Modeling, Identification and Control | nb_NO |
| dc.source.issue | 1 | nb_NO |
| dc.identifier.doi | 10.4173/mic.2016.1.6 | |
| dc.identifier.cristin | 1362774 | |
| dc.description.localcode | © This is an open access article distributed under the Creative Commons Attribution License | nb_NO |
| cristin.unitcode | 194,64,92,0 | |
| cristin.unitname | Institutt for maskinteknikk og produksjon | |
| cristin.ispublished | true | |
| cristin.fulltext | original | |
| cristin.qualitycode | 1 |
Tilhørende fil(er)
Denne innførselen finnes i følgende samling(er)

Med mindre annet er angitt, så er denne innførselen lisensiert som Navngivelse 4.0 Internasjonal